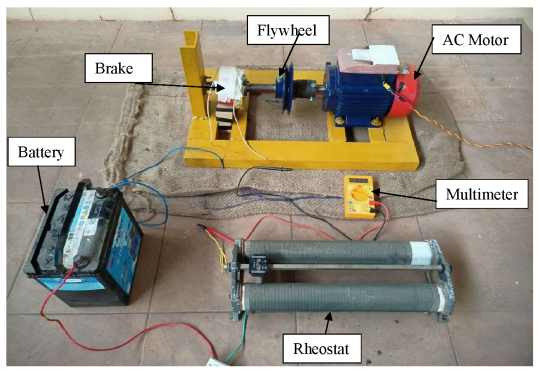
We set up the assembly as shown in the image. The MR brake is fixed in position by a bracket. A DC power supply and a multimeter are connected to both ends of the MR brake to provide the required current for flux generation and for measurement of the current. The shaft of the MR brake is connected to the flywheel through a connector and is rotated at the speed of the motor.
A typical testing procedure is as follows. Firstly, the MR brake is rotated at a speed of 3000 rpm for 30 sec as an initial condition, which stirs the MR fluid in the brake to distribute it uniformly. The desired magnetic field is then applied by setting the coil current and waiting for 1 min, ensuring that the MR fluid is formed into a stable structure. After that, a steady rotary speed is provided to the brake shaft by adjusting the motor. Different set of readings are taken by applying brake for cach set of RPM and Current value.
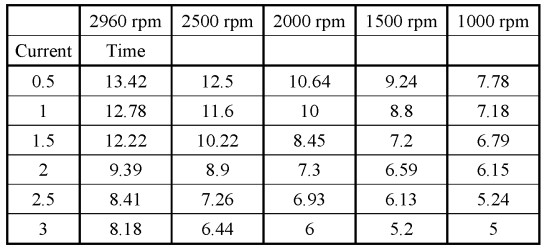
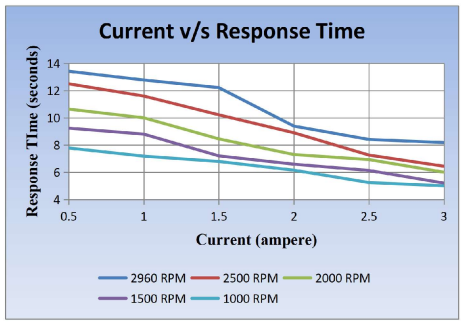
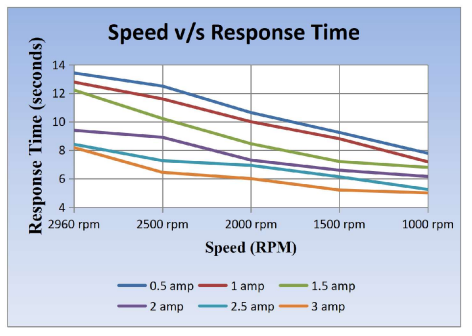
The MR brake performance under steady rotary condition was investigated using the test rig. In the experiment, five typical rotary speeds, i.e., 1000, 1500, 2000, 2500 and 2960 rpm, were used. The effects of magnetic field strength and rotary speed on the transmitted torques are studied and summarised in the following section. The speed of the flywheel is measured with the tachometer in contactless form. The voltage is kept constant and current is varied from 0.5 amp to 3 amp with a rheostat. The response time for braking for each set of reading is noted.